Reversing the RADIO – AES CCM Link in the nRF family
By
Gabriel Gonzalez
For the past few weeks, I’ve been working on a research project that includes radio frequency (RF) nodes with a proprietary protocol running on top of Nordic Semiconductor (Nordic)[1] chips, specifically nrf52840. While it’s been quite challenging (no strings at all and of course no symbols), it’s been interesting and satisfying at the same time. As part of this work, I uncovered the code that handles encryption and decryption of RF packets. I wanted to share my findings in the hope that it will serve as a guide to anyone working on a similar project.
Let’s jump straight to the technical part. These chips use a couple of different crypto peripherals depending on the protocol they implement. In this case, the code used the AESCCM[2][3] engine, which is quite simple. It just takes three main parameters, key /nonce, input buffer, and output buffer. Once these are configured, the system can encrypt or decrypt data.
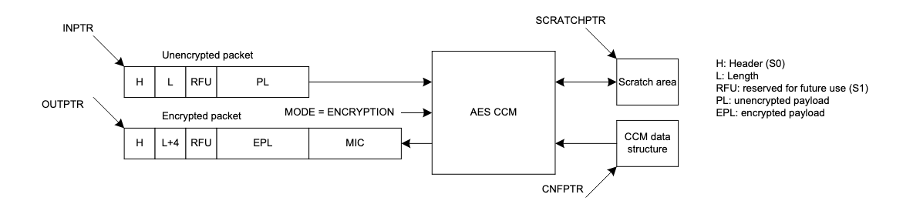
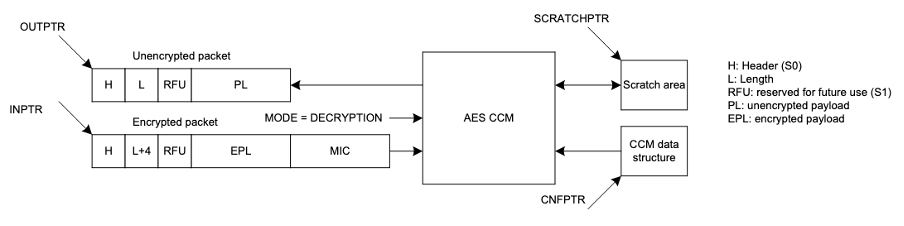
One nice feature of these chips is the ability to chain peripherals using the Programmable Peripheral Interconnect (PPI)[4]subsystem. This allows embedded developers to connect the RADIO peripheral and the crypto engine, causing the AESCCM to immediately trigger encryption or decryption, as can be seen in Figure 1 and Figure 2.
Figure 1. AESCCM Encryption Setup: from https://docs.nordicsemi.com/bundle/ps_nrf52840/page/ccm.html
With this information in mind, let’s jump into the disassembled binary and see what the code looks like. All of the function names, variables, and registers are my best guess based on the reverse-engineered functionality.
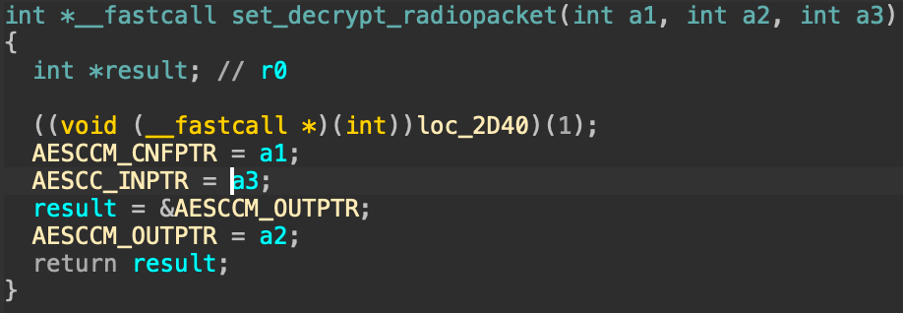
Figure 3. Function to Configure AESCCM Engine
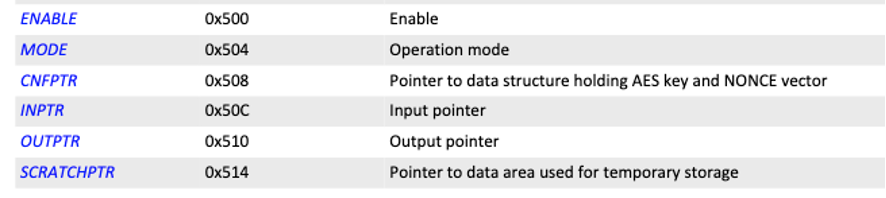
The first function, shown in Figure 3, configures the AESCCM registers. As you know, all the peripherals are memory mapped, so each register instructs the peripheral about what needs to be done or configured. Figure 3 is an example of a register for this specific peripheral. It’s a good starting point for reverse engineering the functionality, since all of the code references in these areas are related to the actual peripheral and its features.
Figure 4. Datasheet Excerpt with AESCCM registers
The specific function in Figure 3 sets argument a2 to the output buffer, a3 to the input buffer, and a1 to the configuration register that points to the key and nonce. This information will assist in further reverse engineering, since we now know which buffer goes to which register.
Later we will see how, depending on whether the code is decrypting or encrypting, it will be used to hold the ciphertext or the plaintext.
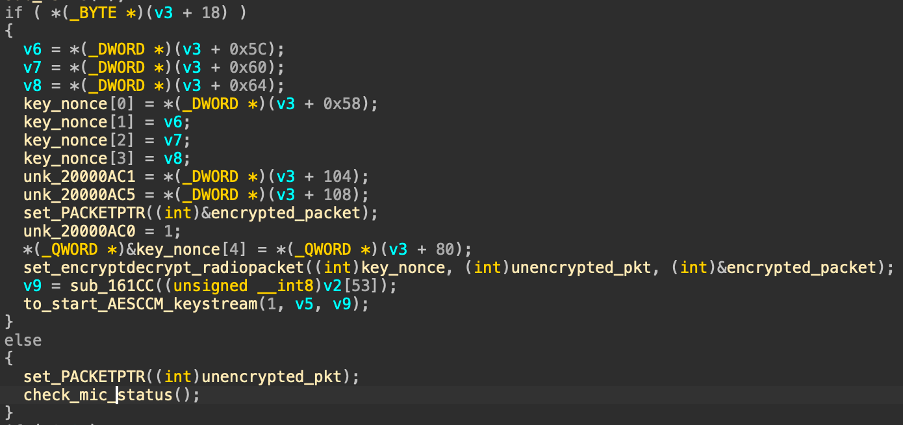
Figure 5. Code to Connect and Handle Incoming RF Packets
As seen in Figure 5, the firmware includes an option where the device does not implement encryption, which is executed in the else statement. This option just sets the buffer to the corresponding RADIO pointer so the peripheral writes the packets as soon as they are demodulated.
However, we are focusing on the first part of the branch where the code deals with the decryption of the RADIO stream. The code sets the encrypted_packet buffer to both the RADIO packet and PACKETPTR (using the set_PACKETPTR function) and, using the function in Figure 3, sets encrypted_packet to INPTR and unencrypted_pkt to OUTPTR, which is the buffer where the AESCCM module will write the decrypted block.
As part of the process, the AESCCM engine needs some additional values (e.g. the key and nonce) in order to correctly decrypt the stream. These are passed as the first argument, as discussed earlier.
Once everything is set, the code instructs the SoC to begin operating using the defined RADIO-AESCCM relationship. This is achieved through further configuration that tells the SoC to make the RADIO and EES peripheral work together using the PPI subsystem.
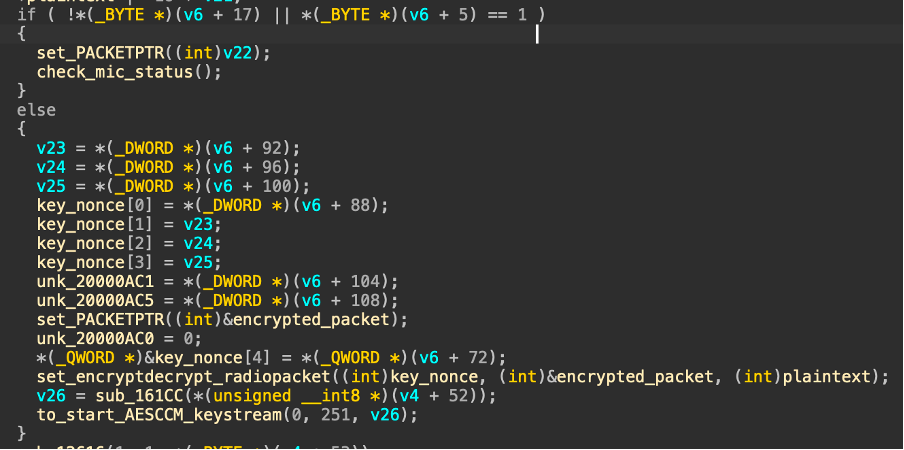
Similar to the decryption path, the firmware implements the ability to send RADIO packets; Figure 6 shows how this is configured. As its counterpart, the code can work with or without encryption/decryption enabled, which is also dealt with in the branch.
Figure 6. Code to Connect and Handle Outgoing RF Rackets
Focusing on the second part where the key/nonce parameters are set, the output and input buffers are swapped, meaning that the RADIO packet points to the encrypted packet (which corresponds to the OUTPTR) and the plaintext is the INPTR.
The firmware very clearly shows how these features are configured and what kind of patterns we can look for when reverse engineering similar functionality on the same chips or others supporting similar peripherals, since these operations are typically quite similar across different vendors.
Authentication Downgrade Attacks: Deep Dive into MFA Bypass
By
Carlos Gomez
Introduction
Phishing-resistant multi-factor authentication (MFA), particularly FIDO2/WebAuthn, has become the industry standard for protecting high-value credentials. Technologies such as YubiKeys and Windows Hello for Business rely on strong cryptographic binding to specific domains, neutralizing traditional credential harvesting and AitM (Adversary-in-the-Middle) attacks.
However, the effectiveness of these controls depends heavily on implementation and configuration. Research conducted by Carlos Gomez at IOActive has identified a critical attack vector that bypasses these protections not by breaking the cryptography, but by manipulating the authentication flow itself. This research introduces two key contributions: first, the weaponization of Cloudflare Workers as a serverless transparent proxy platform that operates on trusted Content Delivery Network (CDN) infrastructure with zero forensic footprint; second, an Authentication Downgrade Attack technique that forces victims to fall back to phishable authentication methods (such as push notifications or OTPs) even when FIDO2 hardware keys are registered.
In this post, we will analyze the technical mechanics of this attack, which utilizes a transparent reverse proxy on serverless infrastructure to intercept and modify server responses in real-time. We will explore the weaponization of Cloudflare Workers, the specific code injections used to hide FIDO2 options, and the business implications of this configuration gap.
Before diving into the technical mechanics, it is important to understand the strategic implication: this is not a theoretical vulnerability. IOActive has operationalized this technique to demonstrate how trusted, serverless infrastructure can neutralize FIDO2 protections without breaking cryptography.
The Innovation: We weaponized Cloudflare Workers to create an invisible, zero-cost proxy that blends with legitimate enterprise traffic, proving that adversaries no longer need expensive and potentially easier to detect infrastructure to succeed.
Business impact: Instead of investing a substantial capital in hardware keys (often over $500k), attackers can use free-tier tools if “mixed mode” authentication policies are left open.
How we can help: IOActive helps organizations validate their actual resilience against these “Living off the Trusted Land” attacks. We move beyond standard testing to simulate sophisticated threat actors and provide you with recommendations to protect your assets against modern, real-world attack vectors.
The Evolution of Phishing Infrastructure
To understand the context of this attack, we must understand the shift in adversary infrastructure. Traditional phishing operations relied on dedicated Virtual Private Servers (VPS), which left identifiable footprints such as static IP addresses, ASN reputation issues, and hosting provider abuse contacts.
More sophisticated threat actors have migrated to serverless platforms. This architecture offers distinct advantages for offensive operations:
Distributed Network: Traffic originates from trusted CDNs, blending with legitimate enterprise traffic.
Ephemeral Existence: Functions execute on demand and leave minimal forensic artifacts.
Cost Efficiency: Massive scale is available for negligible cost.
Weaponizing Cloudflare Workers: The Invisible Proxy
As part of this research, we developed a weaponized proof-of-concept utilizing Cloudflare Workers to function as an invisible, transparent proxy. This tool sits between the victim and the Identity Provider (IdP), intercepting traffic in real-time.
By leveraging Cloudflare’s global edge network, the attack infrastructure gains immediate SSL/TLS legitimacy, high reputation, and resilience against traditional IP-based blocking. This aligns with recent threat intelligence trends where threat actors are increasingly “Living off the Trusted Land” (LotTL).
Recent industry reports confirm that this is not theoretical. Malicious groups such as 0ktapus and Scattered Spider have been observed adopting similar serverless techniques to target high-profile organizations, moving away from static infrastructure to evade detection. Our tool demonstrates that this capability is accessible and highly effective against standard MFA configurations.
Understanding the Transparent Proxy Architecture
The core component of this attack is a transparent reverse proxy that rewrites domains bidirectionally. Unlike generic reverse proxies, this tool is aware of the specific identity provider’s protocol (in this case, Microsoft Entra ID).
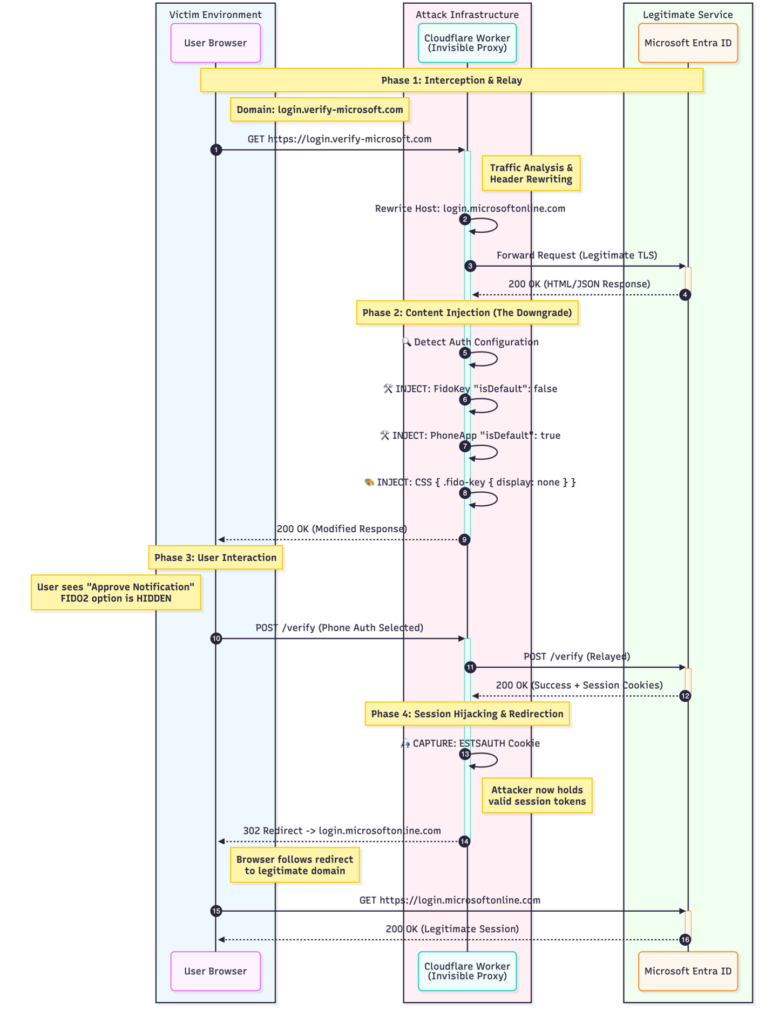
The attack unfolds across four phases:
Phase 1: The victim accesses what appears to be a legitimate Microsoft login domain. The Cloudflare Worker intercepts this request and performs header rewriting to transform the phishing domain into the legitimate Microsoft endpoint.
Phase 2: As the legitimate response from Microsoft flows back through the proxy, the Worker injects malicious payloads that alter the authentication configuration.
Phase 3: The victim interacts with what appears to be an authentic Microsoft interface, unaware that available authentication methods have been manipulated.
Phase 4: Once the victim completes authentication using a phishable method, the Worker captures session tokens and cleanly redirects the victim to the legitimate domain.
The diagram below illustrates this complete workflow, showing how traffic flows between the victim’s browser, the Cloudflare Worker infrastructure, and Microsoft’s authentication servers. Note the bidirectional domain rewriting that occurs at each stage, and the injection points where malicious modifications are introduced into otherwise legitimate responses.
This architecture is effective because every component appears legitimate to both parties. The victim sees authentic Microsoft content served over HTTPS with valid certificates. Microsoft sees legitimate authentication requests coming from IP addresses belonging to Cloudflare’s trusted infrastructure. The only modification happens in transit, within the Worker’s edge execution environment.
Technical Deep Dive: Authentication Downgrade
The attack exploits an implementation gap in how modern authentication interfaces present available methods. These interfaces often render authentication options client-side based on a JSON configuration object sent by the server. When an attacker controls the traffic flow, they can modify this configuration in transit to influence which authentication methods are presented to the user.
We have identified two primary techniques: JSON Configuration Manipulation (true downgrade) and CSS Injection (visual elimination).
Method 1: JSON Configuration Manipulation
This is the preferred technique. When a user authenticates, the IdP sends a JSON object defining the available authentication methods and which one should be the default. By modifying this configuration, the attacker downgrades the authentication priority from phishing-resistant FIDO2 to phishable push notifications.
Pre-Injection State (Legitimate Response)
The server sends a configuration where FidoKey is set to isDefault:true.
The proxy uses regular expressions to locate these keys and invert their boolean values. The goal is to set FIDO2 to false and a phishable method (like PhoneAppNotification) to true.
// Change FIDO2 from default to non-default
content = content.replace(
/("authMethodId":"FidoKey"[^}]*"isDefault":)true/g,
'$1false'
);
// Force Phone App Notification as default
content = content.replace(
/("authMethodId":"PhoneAppNotification"[^}]*"isDefault":)false/g,
'$1true'
);
Post-Injection State (Malicious Response)
The victim’s browser receives a valid configuration telling it to prompt for the Microsoft Authenticator app instead of the FIDO2 key. The user, seeing a familiar prompt, accepts the notification. The server accepts this as a valid login because Phone Authentication is a legitimate, enabled method for that user.
Demonstration: JSON Downgrade in Action
The following videos demonstrate this JSON manipulation technique in practice.
Baseline: Legitimate FIDO2 Authentication
The video below shows a legitimate authentication flow where FIDO2 is functioning as designed. The user navigates to the Microsoft login portal, enters credentials, and is presented with the option to authenticate using a hardware security key. Upon selecting this option and inserting the key, cryptographic challenge-response occurs between the browser and the FIDO2 token.
This is the intended security model. The FIDO2 key performs asymmetric cryptographic operations that are bound to the legitimate domain. Any attempt to phish these credentials would fail because the key would refuse to sign challenges for domains other than login.microsoftonline.com.
Attack: JSON Configuration Manipulation
The next video demonstrates the JSON downgrade attack in isolation. The user’s authentication attempt is routed through our transparent proxy deployed on Cloudflare Workers. As the authentication configuration is transmitted from Microsoft to the victim’s browser, the Worker intercepts the response and modifies the JSON payload using the regex patterns discussed earlier. The FidoKey method is set to non-default, while PhoneAppNotification is promoted to the primary method.
Observe the change. Instead of being presented with the security key option as the primary method, the interface now suggests push notification authentication. The user, trusting the familiar Microsoft interface and seeing no security warnings, approves the notification on their phone. The authentication succeeds normally from both the user’s and server’s perspectives.
Method 2: CSS Injection
This technique does not perform a downgrade in the traditional sense. Instead, it surgically removes the FIDO2 option from the user’s view entirely. The attacker injects a <style> block into the HTML <head> that hides specific DOM elements corresponding to the security key authentication method. The critical distinction is that this gives the user no choice. The option to use FIDO2 is completely eliminated from the interface, forcing them to use the remaining phishable methods.
CSS Injection Logic
The proxy injects CSS rules targeting the specific data attributes and ARIA labels used by the IdP’s frontend framework.
The following analysis demonstrates how the CSS injection surgically removes FIDO2 options while maintaining the appearance of a legitimate Microsoft authentication flow. Unlike the JSON manipulation which changes priorities, this technique completely eliminates the option. The user has no ability to select FIDO2 even if they wanted to.
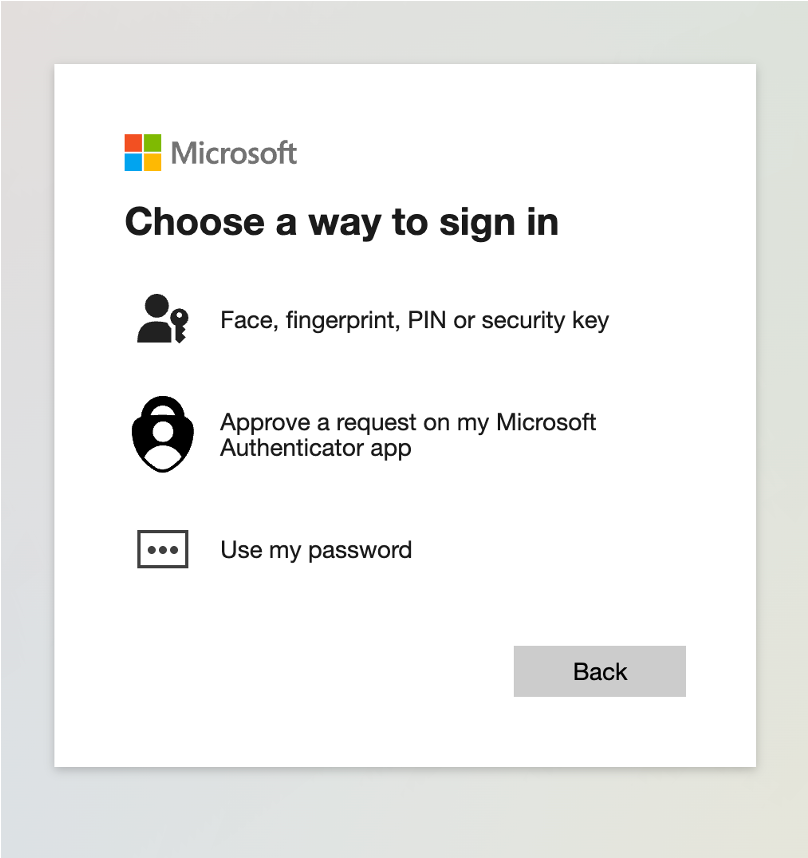
When a user with FIDO2 configured attempts to authenticate through the legitimate Microsoft portal, they are presented with a clear option to use their hardware security key. The interface displays “Sign in with a security key” prominently.
In the standard authentication flow shown above, Microsoft’s interface presents all available authentication methods. The security key option is rendered as an interactive element that the user can select.
However, when the same authentication attempt flows through our transparent proxy with CSS injection enabled, the user experience changes. The proxy has already injected malicious CSS rules targeting specific DOM elements. The underlying HTML structure that Microsoft’s authentication framework generates remains unchanged.
The image above shows the actual HTML source as it would appear in the user’s browser after being processed by Microsoft’s authentication server. Note the specific attributes: data-value=”FidoKey” and the ARIA labels that identify the security key authentication method. These are the precise selectors our CSS injection targets.
The key insight is that while the HTML elements are still present in the DOM, our injected CSS renders them invisible. The browser’s layout engine processes the display: none !important rule, removing these elements from the visible page without modifying the underlying HTML structure.
The above screenshot shows the HTML structure with the targeted elements highlighted in the browser’s developer tools. The div[data-value=”FidoKey”] element is still present in the DOM tree, maintaining the page’s structural integrity. However, the applied CSS styling has set its display property to none, making it completely invisible to the user.
The final result from the victim’s perspective is shown below. The interface appears completely normal: authentic Microsoft branding, legitimate TLS certificates, correct domain (from their perspective), and familiar UI patterns. The only difference is that the security key option has vanished entirely. The user is not given a choice. They cannot select FIDO2 even if they recognize something is wrong.
From the user’s perspective, this appears to be a normal authentication flow. There are no browser warnings, no certificate errors, no visual indicators that anything has been manipulated. The user has no option but to proceed with the phishable methods available.
Demonstration: CSS Injection in Action
The following video demonstrates the CSS injection technique applied during authentication. This captures the moment when the FIDO2 option is eliminated from the interface through injected CSS styling.
This demonstration shows the user interface before and after the CSS injection is applied. The FIDO2 option disappears seamlessly, leaving only the phishable authentication methods visible to the user.
Complete Attack Chain Demonstration
The following video demonstrates the complete end-to-end attack workflow from initial compromise to session hijacking. This recording captures the entire attack chain: the victim receives a phishing link, navigates to the attacker-controlled domain, enters their credentials, completes MFA using the downgraded method, and is seamlessly redirected to the legitimate Microsoft portal. Meanwhile, the attacker captures all necessary session tokens (ESTSAUTH and ESTSAUTHPERSISTENT) to hijack the session independently.
This demonstration shows why the attack is effective. The victim experiences what appears to be a normal authentication flow. There are no obvious red flags, no browser warnings about invalid certificates, no interface anomalies. After successful authentication, the user is redirected to the legitimate domain and can proceed with their work. From the security operations perspective, the logs show legitimate authentication using approved MFA methods from expected IP ranges (Cloudflare’s infrastructure). Traditional security monitoring systems would not flag this activity as suspicious.
Business Impact & Strategic View
The existence of this technique changes the ROI calculation for defensive security investments.
The Investment Gap
Organizations typically spend $50-$100 per employee to deploy FIDO2 hardware. For a 10,000-person enterprise, this is a capital expenditure of $500,000 to $1,000,000. However, if the configuration allows fallback to weaker methods, an attacker using a free Cloudflare Workers account (Cost: $0) can bypass this investment entirely.
Risk Assessment
Target: Organizations with “mixed mode” authentication (FIDO2 + Mobile App/SMS).
Adversary Value: Leveraging a downgrade attack, the adversary forces the authentication flow into a weaker state. This allows them to circumvent the physical hardware requirement and capture authenticated session cookies, granting full access without possessing the key.
Visibility: Low. The logs show a legitimate user authenticating with a legitimate method (Phone App).
Mitigation & Defense
The most effective defense against downgrade attacks is strictly enforcing method allow-lists via Conditional Access policies.
Recommended Actions
Enforce FIDO2-Only Policies: Configure Conditional Access to require phishing-resistant MFA for all users provisioned with keys. Do not allow fallback to push notifications or SMS.
Monitor Authentication Degradation: Create alerts for users who historically authenticate via FIDO2 but suddenly switch to weaker methods from novel IP addresses or locations.
Red Team Validations: Regularly test the effectiveness of these policies. Deployment of hardware is not synonymous with protection; configuration must be validated against active downgrade attempts.
Conclusion
This research demonstrates a critical gap in how organizations approach phishing-resistant MFA deployment. While FIDO2’s cryptographic properties remain sound, its security model assumes that users will always have the option to select it. When threat actors control the communication channel through serverless proxies, they can manipulate this assumption at the presentation layer, either by downgrading priorities through JSON manipulation or by completely eliminating secure options through CSS injection.
The implications extend beyond technical implementation. Organizations investing hundreds of thousands in hardware security key deployments often operate under the assumption that this investment inherently protects them. The reality, as demonstrated through this weaponized Cloudflare Workers implementation, is that adversaries can bypass million-dollar security investments using free-tier serverless infrastructure and several dozen lines of JavaScript.
The attack surface is not the cryptography, it is the configuration gap. Modern authentication systems prioritize flexibility and backward compatibility, allowing multiple authentication methods to coexist. This design decision, while operationally necessary, creates the attack vector. When policies do not enforce exclusive use of phishing-resistant methods, attackers exploit the weakest link in the authentication chain by ensuring users never see the strongest option.
From a defensive perspective, three critical actions emerge.
First, policy enforcement must be absolute. Conditional Access policies should mandate phishing-resistant MFA without fallback mechanisms for users provisioned with FIDO2 keys. The operational friction of lost keys is significantly less costly than a compromised executive account.
Second, behavioral monitoring must detect method degradation. Users who consistently authenticate with FIDO2 but suddenly switch to push notifications from anomalous geographic locations represent a high-confidence indicator of active compromise attempts.
Third, red team validation must simulate real adversary TTPs. This research demonstrates techniques that sophisticated threat actors are already using. Organizations must test their defenses against serverless-based transparent proxies, not theoretical attack models from five years ago.
The serverless paradigm has fundamentally shifted the economics of phishing infrastructure. Threat actors no longer need dedicated servers, static IP addresses, or significant capital investment. They leverage trusted CDN infrastructure, benefit from immediate SSL legitimacy, and operate with minimal forensic footprint. Defensive strategies must evolve accordingly.
This work, conducted by Carlos Gomez at IOActive, highlights the importance of adversary simulation in identifying the gap between security investments and actual protection. The techniques presented here are not hypothetical. They represent the current state of sophisticated phishing operations.
IOActive has fully operationalized these advanced tradecrafts within our Red Team engagements, deploying weaponized infrastructure and proprietary tooling to mirror real-world threat agility.
Organizations that understand this gap can close it through proper configuration and enforcement. Those that do not will continue to invest in security theater while remaining vulnerable to basic manipulation of the authentication flow.
The attached advisory details multiple critical and high-severity vulnerabilities discovered in the CIRCUTOR SGE-PLC1000 and SGE-PLC50 industrial control devices. Researchers identified a wide range of security issues, including buffer overflows, command injection flaws, hardcoded authentication keys, and memory corruption vulnerabilities that could allow attackers to execute arbitrary code, gain administrative access, or disrupt device operations remotely. Several of the findings stem from unsafe handling of user-supplied input and insecure use of functions such as sprintf() and system(). The report emphasizes the potential impact on industrial environments and recommends implementing stronger input validation, safer memory handling practices, and more secure authentication mechanisms to reduce the overall attack surface.
Affected Product
CIRCUTOR – SGE-PLC1000/SGE-PLC50 v 0.9.2 / ServicePack 140411
Title
CIRCUTOR SGE PLC1000/PLC50
Severity
1 Critical, 10 High, 3 medium
Discovered by
Gabriel Gonzalez / Sergio Ruiz
Advisory Date
January 26, 2026
Timeline
2025-03-14: Vulnerabilities identified, disclosure process begins.
2025-09-30: INCIBE gets ahold of the client to fix vulnerabilities
This research white paper from Ehab Hussein, IOActive Principal Artificial Intelligence Engineer and Mohamed Samy, IOActive Senior AI Security Consultant, presents the Husn Canaries defense-in-depth framework, a new standard for protecting organizational assets.
AI-powered coding assistants such as OpenAI Codex, Claude Code, GitHub Copilot, and similar tools are increasingly embedded in everyday software development workflows. While these systems can improve productivity, they also introduce a new class of governance and security challenges. Once source code leaves an organization via (for example) exfiltration, contractor access, or personal devices, organizations lack reliable visibility into whether and when that code is subsequently analyzed by cloud AI providers.
Existing solutions emphasize client-side enforcement approaches: IDE extensions, browser controls, network proxies, lifecycle hooks, and endpoint agents. However, these measures can be bypassed and provide no visibility into external attackers who paste stolen repositories into AI tools outside the organization’s perimeter.
We propose using Husn Canaries, a centralized detection and policy service in which organizations register hard-to-notice patterns already present in their codebases (e.g., tokens or comments, regular expressions, and intentionally placed signatures). Participating AI providers call the Husn API during code indexing and request handling. When Husn identifies pattern matches, it returns policy decisions (e.g., allow with logging, require approval, or block) and emits tamper-resistant alerts back to the organization.
A threat model for AI coding assistant misuse that covers internal developers, external contractors, and external attackers operating with stolen code.
The design of a provider-side, pattern-based architecture that detects AI usage on sensitive code regardless of client configuration or user identity.
A working proof-of-concept implementation using the Model Context Protocol (MCP) and Claude Code, demonstrating real-time enforcement and alerting.
A discussion of limitations, security properties, and deployment considerations for multi-provider adoption.
By shifting detection to AI providers and leveraging hard-to-remove in-code patterns, Husn Canaries turns the AI ecosystem into a distributed early-warning surface for sensitive code.
A video demonstration of this concept can be found below
INSIGHTS | October 31, 2025
Code Review & Dynamic Fuzzing of Microsoft’s Signing Transparency
Security Assessment of Microsoft’s Signing Transparency (ST)
IOActive performed a thorough security assessment of Microsoft’s Signing Transparency (ST) service, focusing on code review, dynamic analysis, and fuzz testing which is designed for use on Azure and is built on the Confidential Consortium Framework (CCF). Conducted from April to June 2025, the evaluation confirmed strong implementation security, secure integration, and compliance with ST’s objectives. Three informational findings suggested defence-in-depth improvements, and one medium-risk issue was resolved during the assessment. ST met its security commitments, though some assurances depend on hardware, system secrets, and users that were outside the scope.
Cybersecurity programs are under increasing pressure to demonstrate measurable efficacy, deliver value, and align with governance expectations—while operating under tight cost constraints. Return on Spend (ROS) and Return on Security Investment (ROSI) have become essential metrics for justifying and sustaining initiatives. This presentation evaluates program performance through the lens of Threat Analysis and Risk Assessment (TARA), drawing on insights from surveys of OEMs, Tier 1 suppliers, tool providers, regulators, fleets, and industry experts.
The study highlights recurring challenges of consistency, quality, and organizational maturity that limit the effectiveness of TARAs, often preventing them from functioning as true safety-critical safeguards. By applying proven process improvement disciplines, such as Lean, Six Sigma, and business process modeling, organizations can modernize their workflows, align with governance objectives, reduce costs, and enhance continuous risk management.
Attendees will gain practical strategies for improving program governance, leveraging performance metrics, and optimizing processes to maximize the ROI of cybersecurity operations. The objective is clear: deliver faster, smarter, and more resilient cybersecurity that drives both safety and business value across the ecosystem.
About the Presenter
Urban Jonson is a co-founder of SERJON (www.serjon.com) and a frequent collaborator with IOActive. Urban is a cybersecurity industry leader and serves in multiple advisory roles, including SAE International, TMC, ESCAR USA, CyberTruck Challenge, and as a cybersecurity expert for FBI InfraGard and the FBI Automotive Sector Working Group.
The semiconductor industry uses a large and complex set of jargon. This set of terms represents the significant intersection of scientific and engineering disciplines in this complex, high-technology industry, including chemistry, physics, material science, electrical engineering, industrial engineering, computer science, and others. However, this jargon can make the industry impenetrable to individuals who must manage the business impacts, cybersecurity consequences, and comprehensive risk to which the industry’s products expose organizations.
In our eGuide on silicon security, we ended with a glossary to aid those readers who may have limited exposure to this industry, in an attempt to make that critical material accessible to laypersons and experts alike while maintaining reasonable accuracy and precision. Our objective was to create short, accurate definitions that are accessible to the layperson, while any subject matter expert (SME) would not say they are wrong. There are absolutely more comprehensive, rigorous explanations of each of these terms, but they reinforce the inaccessibility of the material to non-expert individuals.
We are making these definitions available here in blog format to make them more accessible than they were when buried at the end of a PDF document. We welcome readers to suggest additional terms or clarifications to these definitions to support better decision-making by non-experts.
Broad-beam Ion Mill – A device used to ablate samples, such as microchips and ICs, with a beam of ions.
Conductor – A material which provides limited resistance to the flow of electric charge.
CPU – Central Processing Unit.
Dielectric – See Insulator.
Dual Beam – A workstation combing the functions of the FIB and SEM into a single device that allows for both imaging and editing a microchip or IC without moving the sample between workstations of different types, to improve efficiency and reduce the risk of sample contamination.
FIB – Focused Ion Beam. A technical workstation used to make modifications to a microchip or IC with a beam of ions.
Fuse – Also called an efuse. One-time-programmable (OTP) memory in which write operations are irreversible. Often used to store secure boot keys, permanently disable debug features, etc.
Gate – A core component of a transistor.
I/O – Input/Output.
IC – Integrated Circuit. A small electronic device that contains many interconnected electronic components on a single semiconductor chip.
ILD – Interlayer dielectric. An insulator separating two adjacent layers of wiring.
Insulator – A material which resists or inhibits the flow of electric charge.
Logic Cell – A digital circuit containing several transistors which performs a basic logical function, such as a Boolean AND or OR.
Microchip – An IC device manufactured using semiconductor material with layers of electronic components used to process or store information. Also referred to as a chip, computer chip, or IC.
Microcontroller – A single-chip device containing a CPU, RAM, ROM, and I/O peripherals. These are normally used in single-task applications and do not require an operating system.
Microprocessor – A standalone processing unit used in general-purpose computing tasks. These units require external components like memory and peripherals. These normally run an operating system.
Node – See Process Node.
Process Node – A vendor-specific semiconductor manufacturing process and associated design rules. Generally, in the past the node name referenced the feature size of components that could be manufactured with the process. Today the number in the node name no longer tightly corresponds to feature size.
RAM – Random-Access Memory.
Reactive Ion Etching – A type of dry etching with different characteristics than wet etching, which uses chemically reactive plasma to remove material from a target.
RIE – Reactive Ion Etcher.
ROM – Read-Only Memory.
Root of Trust (RoT) – A source that is intended to always be trusted within a system. Generally, these systems utilize cryptography to enable integrity, confidentiality, and authentication within the system.
Secure Boot – A security feature intended to protect a device’s integrity during the boot or startup process by verifying cryptographic signatures of the operating system and bootloader.
Secure Element – An integrated hardware and software component in an IC intended to protect against software and hardware attacks and isolate high-consequence data like a root of trust or cryptographic material.
SEM – Scanning Electron Microscope.
Semiconductor – A unique class of materials which is not exclusively a conductor or insulator.
Technology Node – See Process Node.
TEE – Trusted Execution Enclave. A protected area of a microprocessor’s memory and CPU intended to keep data and code secure.
Transistor – The fundamental component in ICs that controls (switches) the flow of electrical current between two terminals: the source and drain.
Vulnerability – A security defect that is present and exploitable in an environment.
INSIGHTS | September 17, 2025
Deepfake Defense: From No-Cost Basics to Enterprise-Grade Controls
By
Dave Falkenstein
At CanSecWest 2025 I walked through a red team where we used AI voice cloning to test an organization’s people and processes. The short version is this: a familiar voice is not identity. Treat voice as untrusted input and move verification into systems you control.
The financial exposure is no longer hypothetical. Deloitte estimates fraud losses in the United States could reach 40 billion dollars by 2027 as generative AI accelerates vishing and synthetic media.
Recent incidents back this up, including the 25 million dollar Hong Kong video-call heist tied to a deepfake of company leaders, and the Ferrari CEO impersonation attempt that an employee stopped by asking a question only the real executive could answer. Outside the enterprise, deepfake investment ads continue to run across Meta platforms, which erodes trust in familiar faces and voices your employees see every day. In government, an AI voice impersonating the U.S. Secretary of State contacted foreign ministers and U.S. officials in June 2025. Both trends increase the chance that urgency and authority will be misread as authenticity.
What changed
Cloning a usable voice takes seconds of public audio and commodity tools. On the receiving end, most victims are reached by phone or collaboration apps, not polished video. The attacker leans on urgency, hierarchy, and insider context, then pushes to finish before the target can shift to a verified process. The fix is a workflow that forces that shift.
Caller ID helps less than many expect. STIR/SHAKEN can authenticate numbers on IP networks, but it is not proof of who is speaking, and non-IP gaps are still being addressed by the FCC. Treat attestation as a helpful signal, not a decision.
The most targeted roles are accounts payable, vendor management, helpdesk, executive assistants, and HR. If you only harden one slice of the company, start there. Make it clear those teams can slow or refuse requests that arrive by phone or ad-hoc video without any penalty.
How the scam runs in practice
Attackers harvest voice and context from interviews, talks, and social videos. They start a call or meeting that looks routine, often with a look-alike number, and ask for a payment, a vendor add, or a credential reset.
If questioned, they add pressure and a sense of urgency by claiming a change needs to be made immediately for access to a meeting. The goal is to keep you in the real-time channel where social pressure works, and logging is weak. Your goal is to move the request into a tracked system where identity is verified, and more than one person approves.
Meeting platforms are part of the story too. Treat unscheduled or “special” meetings the same way as calls. Use lobbies and named invites. If a meeting requests a payment, an entitlement change, or a vendor add, move it into the approval system and end the call.
Controls by maturity
Entry level
Ban voice-only approvals. No payments, access changes, or identity changes are executed from calls or voicemails. Put the request into a ticket or approval flow first.
Directory callback only. If “the CFO” calls, hang up and call back using the corporate directory contact, not the inbound number.
One-time challenge in a second channel. Send a short code in Slack or Teams and have the caller read it back. Avoid static passphrases that can leak.
Plain-language script. “Per policy I am moving this into our approval workflow and calling you back on the directory number. I will send you a code in Slack in 10 seconds.”
Show what fakes sound like. With consent, let staff hear an internal clone so they learn what “good enough” fakery sounds like. Realtime voice clones and Text to speech voice clones will each have differing levels of quality that can be picked up on.
Bank instruction rule. Publish a standing rule that your bank instructions never change by phone or email. Put that statement on invoices and vendor onboarding materials so finance has a clear policy to point to.
Mid-maturity
Cross-channel confirmation by default. Every sensitive request is confirmed in a second, logged channel and attached to a ticket or approval artifact.
Approvals inside Slack or Teams. Use Microsoft Teams Approvals or Power Automate for sequential and multi-stage approvals, or Slack Workflow Builder for routed approvals with an audit trail.
Surface STIR/SHAKEN as a signal. If your carrier exposes attestation, show it in softphones and train that it is advisory, not identity.
Target training. Focus on AP, vendor management, helpdesk, executive assistants, and HR.
Lock down account recovery. Do not allow phone-based resets or knowledge questions for admins, finance approvers, or identity administrators. Require device-bound authenticators or passkeys and route all recovery into a ticket with second-party approval.
Enterprise-grade
Multi-party, cross-function approvals. Require at least two approvers from different functions for wires, new vendors, privileged access, and identity changes. Build this into Teams or Slack plus your ticketing or ERP.
Timed holds for high-risk actions. Add a 2 to 24 hour hold for first-time payees, large payments, and new vendors. Require re-affirmation during the hold.
Telco posture with specifics. Ask providers about STIR/SHAKEN coverage and expose attestation in your tooling. Track FCC work to close non-IP gaps and treat caller authentication as one input among many.
Executive exposure management. Where practical, limit long, clean public voice samples, and trim long monologues into shorter clips.
Incident response if you suspect a deepfake call
End the live channel and move to policy. Open a ticket, freeze any pending payment or access change, and notify finance leadership and security. If the window for a bank recall exists, contact your bank immediately. Save call metadata and collaboration logs. If recording calls is part of your workflow, make sure you follow local consent laws.
Do we need a deepfake detector?
Use detectors as a signal, not a gate. Accuracy varies in the wild, especially with compressed audio and human-in-the-loop attackers. Directory callbacks, second-channel challenges, multi-party approvals, and timed holds are what stop losses when detection misses.
Conclusion
Deepfakes are a forcing function for better workflow. Start by removing voice-only approvals and requiring directory callbacks and second-channel challenges. Add routed approvals inside Slack or Teams. For high-risk actions, require multiple approvers and a hold. If a perfect clone calls, these controls still give your team time to slow down and verify before money moves.
About the Author
Dave Falkenstein, Red Team Tech Lead, IOActive. Based on the CanSecWest 2025 talk “Deepfake Deception: Weaponizing AI-Generated Voice Clones in Social Engineering Attacks.”
Additional Resource
The Wall Street Journal | IOActive Senior Security Consultant David Falkenstein and The Wall Street Journal recently collaborated to create a quiz that looks to test if “your ears [can] distinguish a human voice from an AI deepfake…”
David was able to use AI to clone The Wall Street Journal colleagues sourced from publicly available social media clips and used OpenAudio to help run the experiment.
“Can your ears distinguish a human voice from an AI deepfake? Knowing the difference could save you from a phone scam that costs you thousands of dollars. …
… To test this, we enlisted David Falkenstein of corporate security firm IOActive to clone a few Wall Street Journal colleagues. He pulled down bits of our publicly available social-media and podcast audio, clips just 10 to 30 seconds in length. He used OpenAudio—easily accessible software that can run on a laptop—to make our voices say some pretty crazy things.”
INSIGHTS | July 31, 2025
Characterizing the Raspberry Pico 2 FI countermeasures – Part 1
By
Ramiro Pareja Veredas
Let’s start by saying that the Pico 2 – or more specifically, the RP2350 MCU – is an impressive chip. It’s powerful, packed with peripherals and features (I love the PIO!), easy to use and develop with, and from a security standpoint, exceptionally well designed.
After more than 10 years in chip security evaluations, I can confidently say that the RP2350 might be one of the most secure general-purpose, off-the-shelf MCUs on the market. I’ve evaluated enough chips to recognize when a system-on-chip (SoC) was designed with security in mind from the very beginning – integrating protection mechanisms early in the design phase – versus when security is treated as an afterthought, patched in late just to meet the minimum requirements. There’s no doubt: security was a top priority during the development of the RP2350.
The Raspberry Pi Foundation, clearly confident in their product, launched a bug bounty program offering €10,000 to the first person who could extract a secret stored in the Pico 2’s fuses. After a month without any successful claims, they doubled the reward to €20,000. To my knowledge, this is the first time a silicon developer has offered such a bounty – a commendable move.
That confidence is rooted in the chip’s well-engineered Secure Boot process and an effective glitch detector – both of which were tested extensively for months by two independent security firms prior to release. Still…it’s not perfect.
In January 2025, four winners for the challenge were announced, including IOActive’s Silicon Security team, which uncovered a novel method to invasively extract secrets from the RP2350 antifuse OTP. By leveraging a focused-ion-beam (FIB) microscope with passive voltage contrast (PVC), IOActive demonstrated an attack that challenges the long-standing assumption that antifuses are physically unreadable – posing a serious threat to any secure design that relies on them.
In addition to this invasive technique, this post – and those that follow – will document IOActive’s efforts to use fault injection (FI) to glitch and bypass the security protections of the Pico 2. This article assumes that the reader already has a basic understanding of fault injection. If not, I recommend reading up on the topic before proceeding.
Note: At the time this article was originally written (October 2024), the results of the Raspberry Pico 2 challenge were not yet published. This article has been updated in July 2025 to refer to those hacks.
The glitch detector
The RP2350 implements four glitch detectors, described in the datasheet as follows:
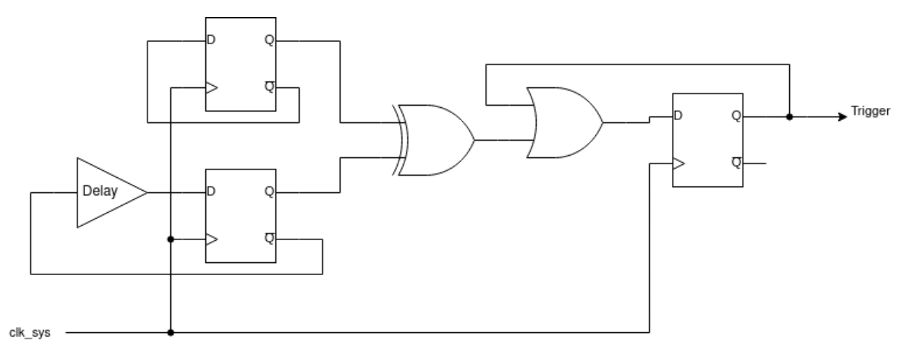
Figure 1. RP2350 glitch detector
The idea behind these detectors is straightforward: the output of two D-latches is XORed to detect differences. If a glitch is injected, it may flip the state of only one of the latches, immediately triggering the detector. To detect glitches that could flip both latches, a delay is inserted in the feedback path of one of the latches. If the glitch flips both D-latches simultaneously, the delayed feedback would force the latches to take on different values on the next clock cycle and the detector would be triggered.
Each of the four detectors can be independently configured via the GLITCH_DETECTOR.SENSITIVITY register or the OTP fuse CRIT1.GLITCH_DETECTOR_SENS. There are four sensitivity levels available, allowing fine-tuned detection based on the expected operating environment.
When a glitch is detected, the GLITCH_DETECTOR.TRIG_STATUS register indicates which of the detectors were triggered. If the glitch detectors are armed – either by writing to the GLITCH_DETECTOR.ARM register or by programming the OTP fuse CRIT1.GLITCH_DETECTOR_ENABLE – a reset is asserted automatically upon detection. In such cases, the HAD_GLITCH_DETECT bit in the POWMAN.CHIP_RESET register is set, indicating that the last reset was caused by the glitch detector.
Interestingly, it’s possible to monitor the output of the glitch detectors without triggering a reset – a feature that proves very useful when characterizing the detectors and tuning glitch parameters during testing.
The fact that the chip includes only four glitch detectors raises an important question: how resilient is this design against localized fault injection? It’s clear that a focused laser fault injection (L-FI) attack should bypass these detectors. This has been demonstrated by the winner of the Pico2 challenge, Kévin Courdesses, who modified an OpenFlex microscope to inject laser glitches.
But what about more common localized FI methods, like electromagnetic fault injection (EMFI) or body-bias injection (BBI)? That’s something we’ll explore in a future post, but Thomas Roth has already demonstrated that such an attack is feasible.
Characterizing the CPU with crowbar glitching
The first step in our evaluation was to assess the CPU’s sensitivity to voltage glitches. For this initial fault injection (FI) campaign, we disabled all glitch detectors – setting the sensitivity level to 0 and not arming them – in order to observe the CPU’s raw behavior without any interference from built-in protections and countermeasures.
For the glitching technique, we opted for crowbar switching, one of the most widely used methods in voltage fault injection. Its popularity stems largely from the simplicity and affordability of the hardware required. However, crowbar switching also offers technical advantages over other voltage glitching methods, which we’ll discuss later. In future posts, we’ll also cover results obtained using a DAC to generate voltage glitches and compare the two approaches in terms of effectiveness and control.
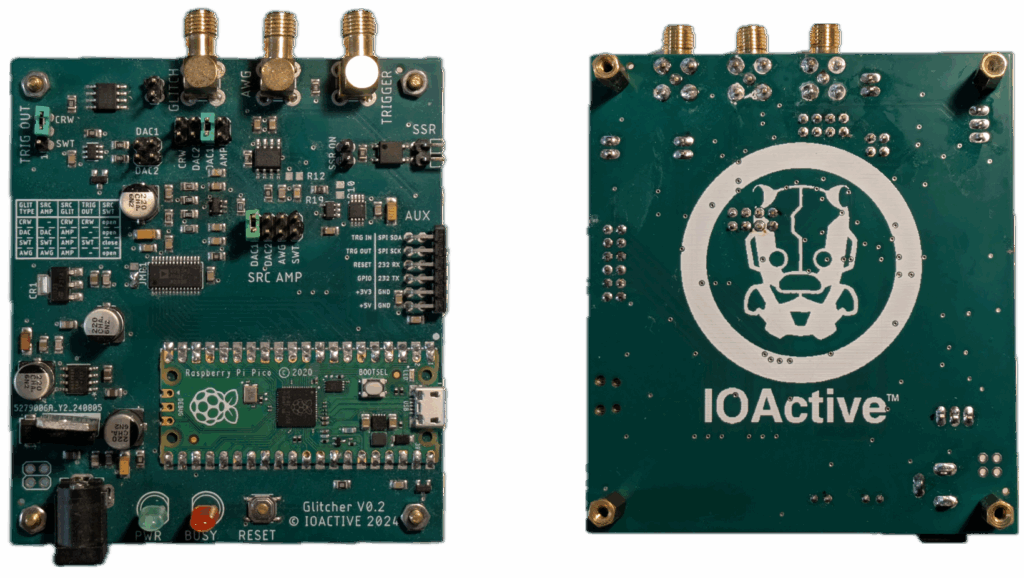
To inject the glitches, we used a tool called Glitch.IO. This tool is an in-house development based on the Raspberry Pi Pico, like many other glitchers, but with several unique features not previously seen in similar tools. Some of these unique features will be introduced throughout this series of posts. The Glitch.IO will be released as open hardware soon during Black Hat USA 2025.
Figure 2. Glitch.IO
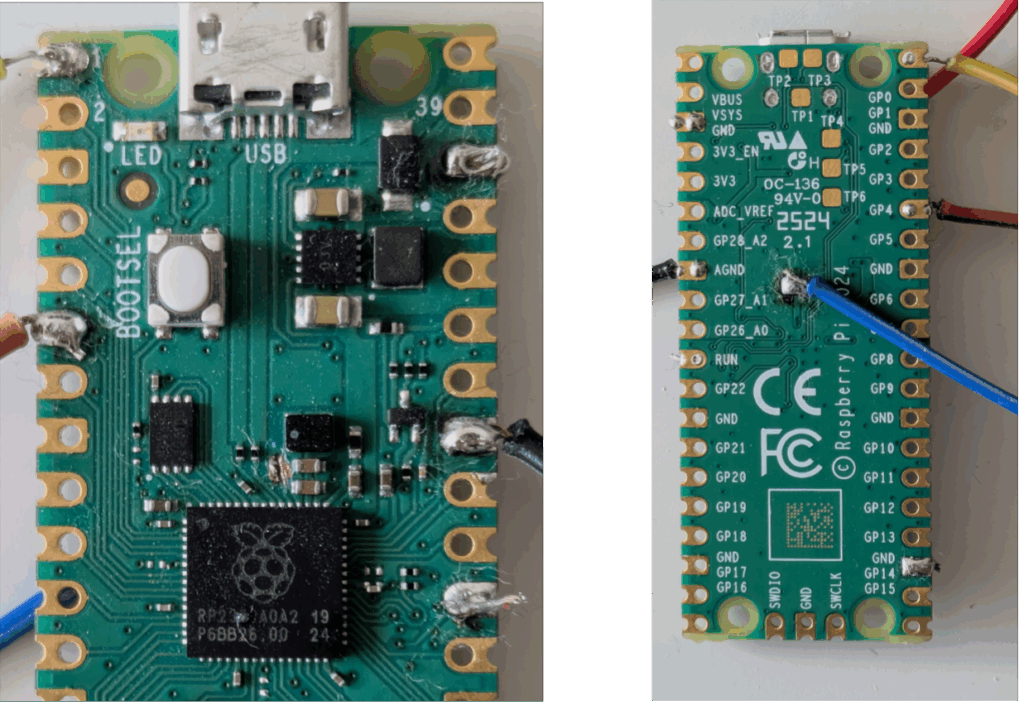
Modifying the Pico2 board
Before performing glitching experiments on the Raspberry Pi Pico 2, we first needed to modify the board to isolate the CPU power plane and remove its associated capacitance.
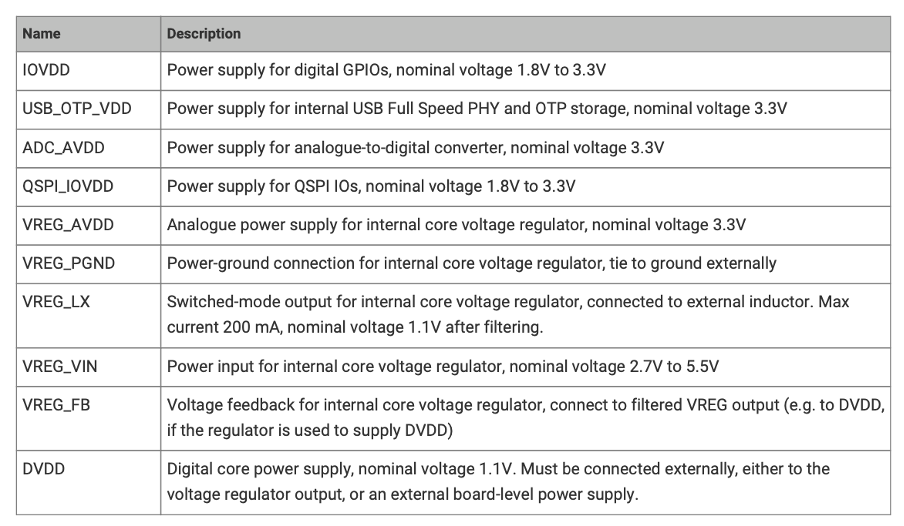
According to the datasheet (see Figure 3), the RP2350 features five power supply domains. However, only one is relevant for our purposes: DVDD – the 1.1V rail that powers the CPU core. This is the supply line where we’ll be injecting our glitches. The remaining power supplies operate at 3.3V and are not initially of interest for this stage of testing.
Note: Aedan Cullen – the third winner of the Pico2 challenge – found that the USB_OTP_VDD power rails is also interesting for glitching. I recommend his presentation at the 38C3.
Figure 3. Power supply pin description
To reduce the bill of materials (BOM) and facilitate the PCB design, the RP2350 chip has an integrated Switched-Mode Power Supply (SMPS ) that can generate the 1.1V from the 3.3V rail.
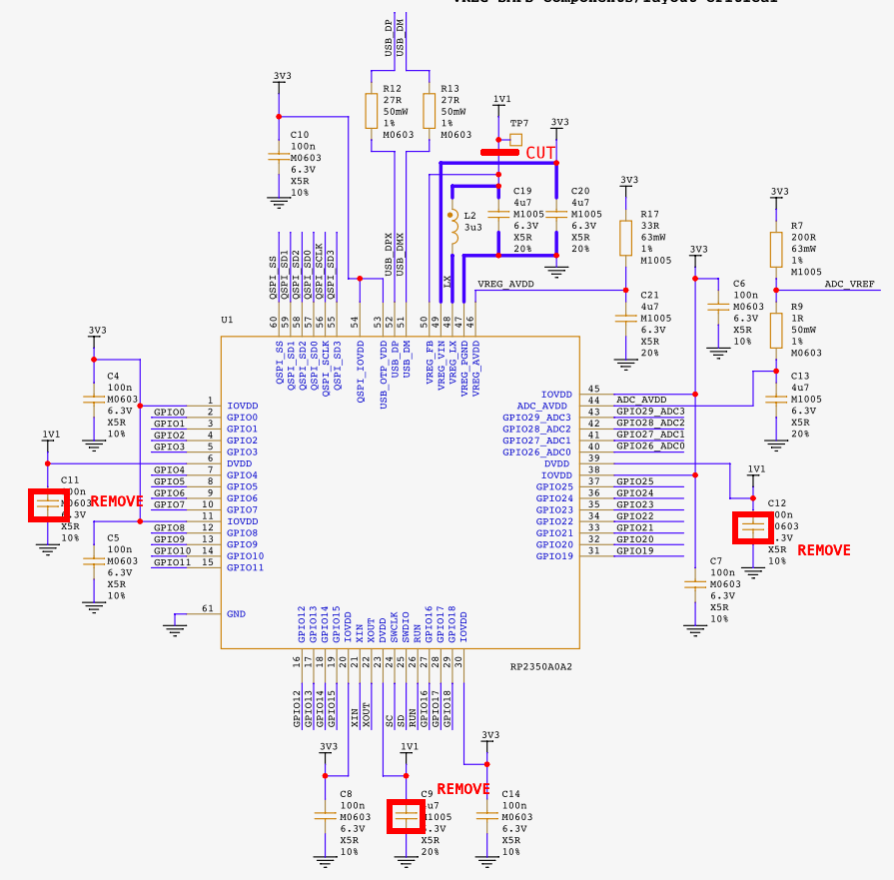
Referring to the Raspberry Pi Pico 2 schematics (available as an annex in the datasheet), we identified the decoupling capacitors on the DVDD power plane: C9, C11, and C12. These were removed to reduce the capacitance on the DVDD line, making the PCB more susceptible to glitches. Additionally, since we plan to perform DAC-based glitching and supply custom voltage profiles to the core, we had to isolate the DVDD pins from the SMPS output. To do this, we cut the trace connecting the 1.1V line to VREG_FB, effectively decoupling the internal regulator. We then supplied power directly to the DVDD rail using test point TP7 and an external power supply.
Figure 4 shows all of the modifications done in the schematic, and Figure 5 shows those modifications on the PCB.
Figure 4. Modifications in the schematic
Figure 5. Raspberry Pico 2 modified for FI
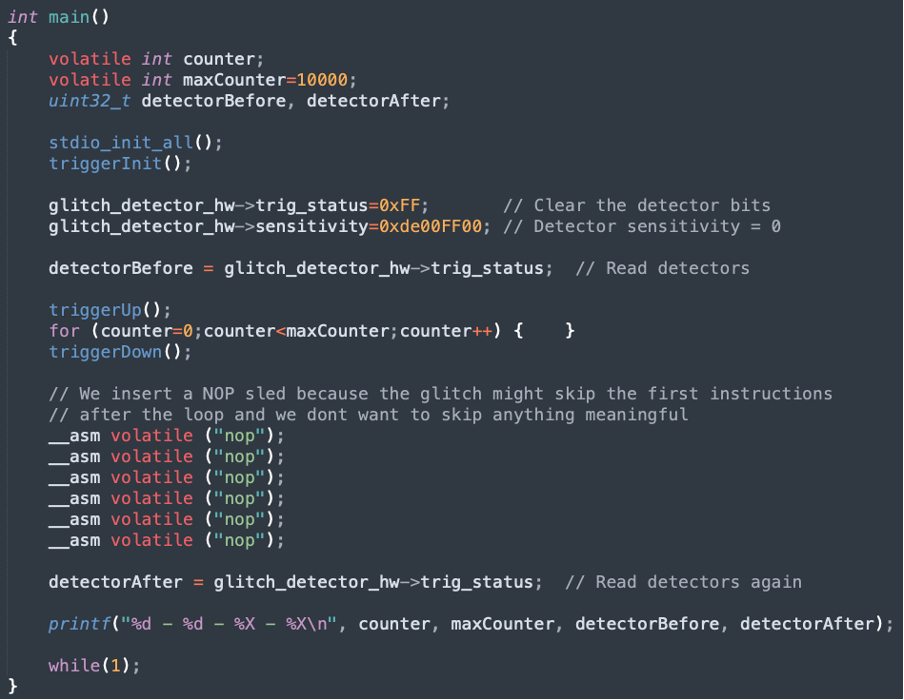
The test application
To characterize the target, we developed a standard “for loop” test application, shown in Figure 6, that will run on the Raspberry Pico 2. Before entering the loop, the glitch detectors are configured. After the loop is completed, the application prints the status of the detectors.
The goal of this fault injection (FI) campaign is to determine the optimal glitch parameters that can disrupt the execution of the loop without triggering the glitch detectors.
Figure 6. For loop characterization test application
The glitch application
The glitching tool must run an application responsible for four key tasks:
1. Preparing the target device for glitching
2. Waiting for a trigger
3. Injecting the glitch
4. Evaluating the target’s response and the glitch’s effects
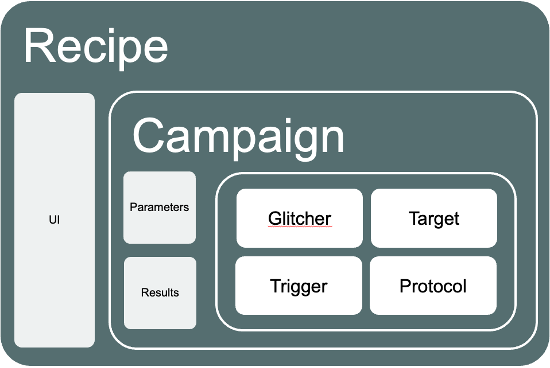
The Glitch.IO SDK simplifies the development of such applications. It provides a collection of modular classes designed to abstract and streamline the glitching process:
Glitchers: Implement different glitching techniques, such as crowbar, DAC-generated glitches, clock glitches, reset glitches, and MUX switching.
Triggers: Define how glitches are synchronized, supporting a variety of trigger sources (e.g., GPIO rise/fall, reset lines, UART RX/TX).
Protocols: Implement generic communication protocols like SWD, JTAG, etc.
Targets: Define the specific attack or test logic – for example, attacking secure boot, bypassing debug protections, or characterizing glitch sensitivity.
These components are instantiated and combined to form a “recipe” – an application that implements a specific attack on a specific device. Figure 7 represents the software architecture of a Glitch.IO application, and the following code shows the recipe used to characterize the Raspberry Pico 2.
In this recipe, glitch parameters and their variation strategies are defined in initializeParameters(). In main(), we instantiate and wire together the glitcher, trigger, and target components.
The Glitch.IO SDK also includes example recipes for common FI attacks against popular MCUs from vendors like NXP and ST – making it easy to get started with real-world targets.
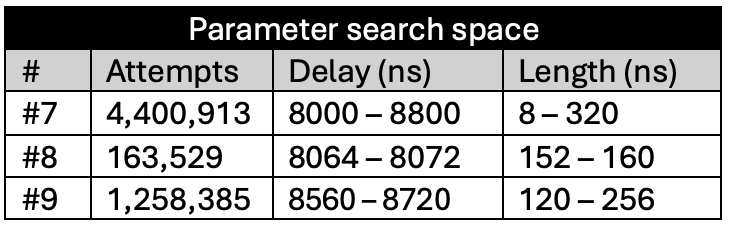
The FI campaign
The glitch detectors in the RP2350 can be configured at four different sensitivity levels. For each level, we ran a series of FI campaigns: starting with broad glitch parameter sweeps and then progressively narrowing them down in an attempt to maximize the success rate – defined as glitches that disrupt execution without being detected.
Throughout the campaigns, we logged two key outcomes:
Whether the glitch was successful (i.e., it altered the behavior of the for loop).
Which glitch detectors, if any, were triggered.
All tests were performed using an external 1.1V power supply, and the chip was reset after each glitch attempt to ensure a consistent starting state.
During testing, the injected glitches produced a variety of observable effects. We classified the results into the following categories:
Normal: The glitch had no observable effect on chip behavior.
Reset: The glitch caused a system crash or full reset.
Success: The loop counter was altered, but no glitch detectors were triggered.
Detected 1–4: The loop counter was altered, and one to four glitch detectors were triggered, respectively.
Unknown: The device printed unexpected characters, suggesting some level of corruption.
Error: Any other unclassified or abnormal behavior.
The following sections summarize the results of the fault injection characterization campaigns, organized by glitch detector sensitivity level.
At this lowest sensitivity level, the glitch detectors are effectively disabled – they seemed to not be functional and could not be triggered. This allowed us to focus purely on the CPU’s sensitivity to glitches without interference from detection mechanisms.
We conducted three separate FI campaigns at this level, progressively narrowing the glitch parameters (e.g., delay and length) to identify the most effective combinations.
Figure 8 shows the plots of the glitch results. A clear boundary is visible between the green and yellow zones: this is where the glitch becomes too long or powerful, consistently crashing the target. The red points appear along this boundary, but only at specific delay values – those that align precisely with the execution of the instruction that when glitched breaks the loop. This correlation provides strong insight into the CPU’s timing sensitivity and the ideal glitch injection window. The highest success rate achieved was almost 14%.
At this sensitivity level, the glitch detectors were still unable to detect any of the injected glitches. The results were largely indistinguishable from those observed at Sensitivity Level 0.
Due to the lack of significant behavioral differences, only a single short campaign was conducted at this level to confirm the similarity. No glitches were detected, and successful fault injections continued to occur under the same timing and voltage conditions as before.
Figure 9. Sensitivity level 1 – Campaign #4
The following tables summarize the results for this campaign:
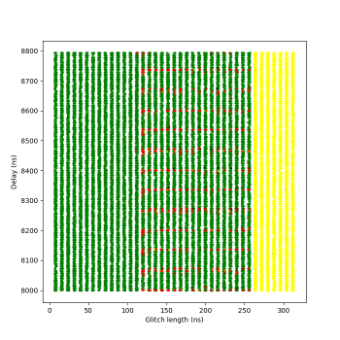
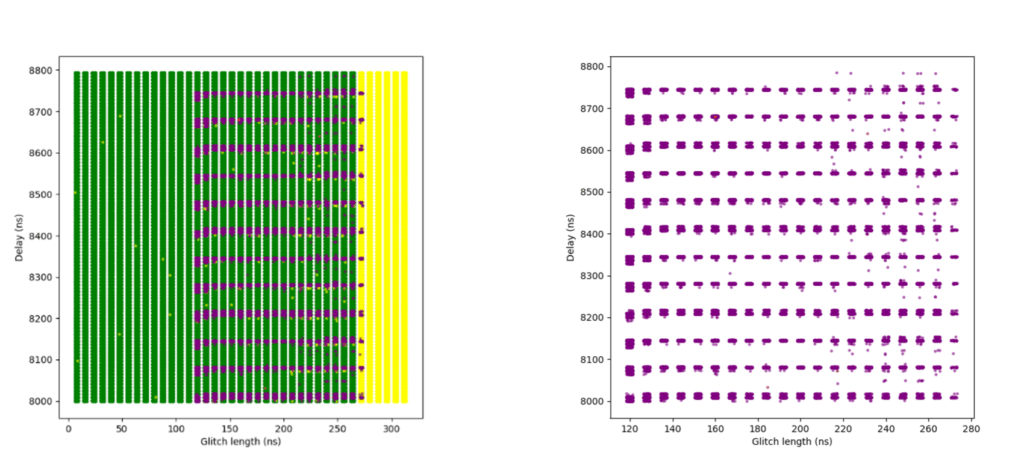
This is the first sensitivity level at which the glitch detectors were successfully triggered by our fault injections. However, it was still relatively easy to bypass the detectors under certain conditions.
In the plot shown in Figure 10, additional colors indicate the number of detectors triggered during successful glitches – that is, glitches that broke the loop logic but:
Blue: 1 detector was triggered
Magenta: 2 detectors were triggered
Cyan: 3 detectors were triggered
Purple: All 4 detectors were triggered
To improve clarity, a second version of the plot is included, where green (normal glitches) and yellow (reset events) have been removed, making it easier to focus on detection behavior.
Figure 10. Sensitivity level 2 – campaign #5
A success rate of nearly 7% was achieved in this campaign – relatively high, considering this was the third level of sensitivity. These results suggest that while detection is now functional, the protection can still be bypassed with a well-timed and well-parameterized glitch.
The following tables summarize the different campaigns conducted at this sensitivity level and their respective outcomes.
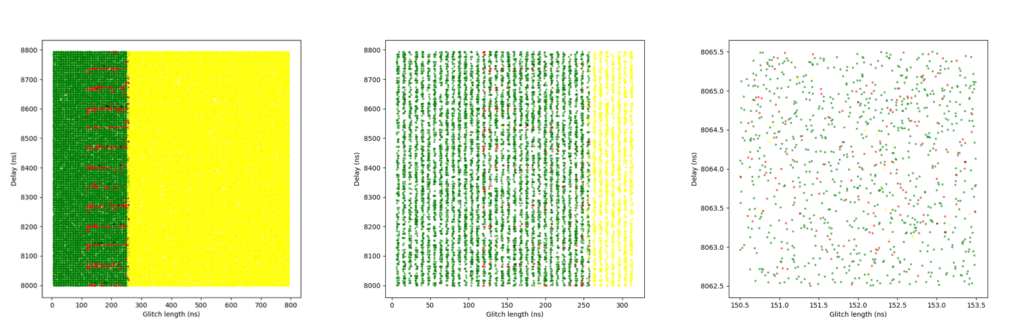
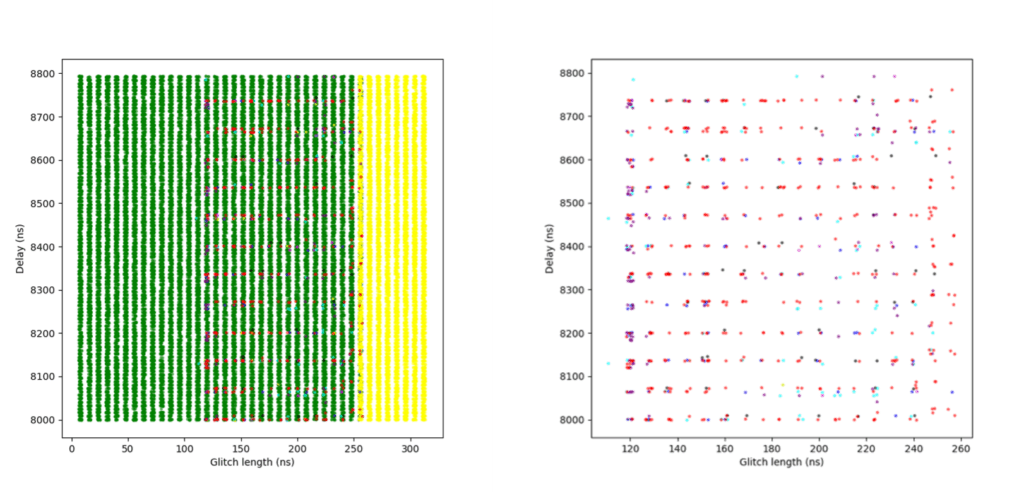
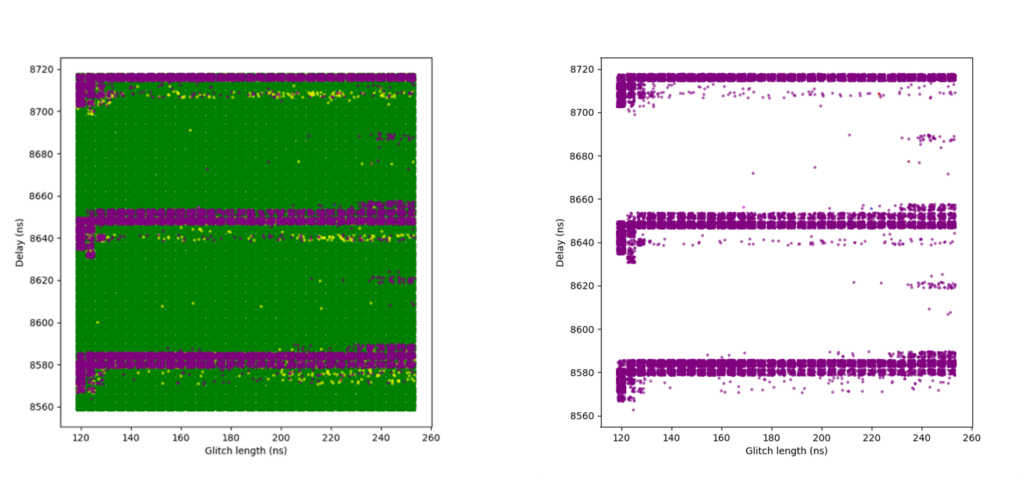
At this highest sensitivity level, the glitch detectors become very effective. Although we were still able to achieve some successful glitches, the success rate dropped significantly.
An initial campaign using broader parameters resulted in a small number of successful glitches. A second campaign attempted to narrow the parameter range based on what had worked at Sensitivity Level 2 but yielded no successful results. In hindsight, this was likely due to insufficient glitch attempts.
A third and final campaign expanded the narrowed parameter range slightly and achieved a modestly improved success rate. However, even then the rate was only about 0.0002%, indicating that the detectors are highly effective at this level.
One interesting observation is that while at Sensitivity Level 2, many glitches triggered only one, two, or three detectors, at Sensitivity Level 3, glitches almost always triggered all four detectors.
The following plots show the two campaigns with broader parameters. In the right-hand plots, green and yellow dots are removed to better highlight successful red points.
Figure 11. Sensitivity Level 3 – Campaign #6
Figure 12. Sensitivity Level 3 – Campaign #8
Additional campaigns (not included in this article) attempted to further refine parameters around previously successful glitches, but did not yield any improvement in the success rate.
The following tables summarize the results for the three campaigns conducted at this sensitivity level.
Our experiments demonstrate that the RP2350’s glitch detectors are highly effective – but only when configured at the highest sensitivity level. At Sensitivity Levels 0 and 1, the detectors provided no meaningful protection. Sensitivity Level 2 reduced the success rate significantly, but not enough to prevent a fault injection (FI) attack (almost a 7% success rate).
Even at Sensitivity Level 3, it was still possible to glitch the RP2350, albeit with a very low success rate of approximately 0.00016% – or roughly one successful glitch every 625,000 attempts. Given that our setup could inject glitches at around 30 attempts per second, this translated to an average attack time of under six hours to achieve a successful result.
However, it’s crucial to place these results in context to properly evaluate the real-world risk of using the RP2350 in a security-critical application.
All experiments were conducted under ideal lab conditions:
Full control over the target
Precise and reliable trigger signals
Fast reset cycle
A test application that executes the vulnerable instruction repeatedly, every few clock cycles
These ideal conditions greatly increased our odds of success. In contrast, a real-world attack would face substantial challenges:
Limited or no access to CPU internals
Unreliable or noisy trigger sources
Potentially long and variable reset/restart times
Application code that executes sensitive operations infrequently or unpredictably
Introducing software countermeasures – such as instruction-level redundancy or random delays – would further reduce the success rate, often requiring multiple or perfectly timed glitches. Under such constraints, an attacker may require several months to mount a successful attack using crowbar-based glitching alone.
In future articles, we’ll explore whether the same conclusions hold for other glitching techniques, such as DAC-generated glitches or electromagnetic fault injection (EMFI).
Note: The winners of the Raspberry Pi Pico 2 challenge have shown that crowbar glitching the RP2350 can be much easier under specific conditions:
– Aedan Cullen successfully attacked the USB_OTP_VDD rail – a power domain not monitored by the glitch detectors.
– Marius Muench targeted the main VCC rail. However, as of this writing, no public information has been released about his glitching method or achieved success rate.
Guest blog by Urban Jonson, SERJON with John Sheehy and Kevin Harnett
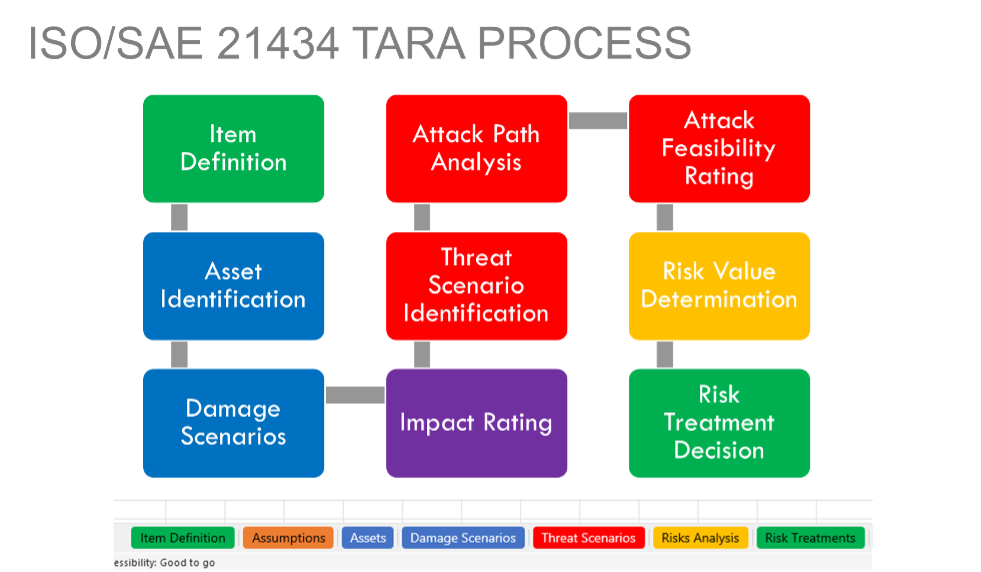
During my recent presentation at ESCAR USA, I shared findings from my latest research on the automotive industry’s adoption of Threat Analysis and Risk Assessment (TARA) processes to develop cybersecurity artifacts that align with regulatory requirements. The automotive TARA is a systematic process used to identify potential cybersecurity threats to vehicle systems, evaluate their likelihood and impact, and determine appropriate mitigations to reduce risk to acceptable levels.
One key insight derived across numerous TARA exercises is that many organizations struggle with consistency and accuracy in their internal cybersecurity documentation. To address this, I recommend thoroughly analyzing the workflows involved in creating, reviewing, and approving such documentation. By applying business process reengineering principles and best practices, organizations can streamline and strengthen these workflows.
These findings also highlight a broader pattern that we have observed across the gamut of industries, from automotive to energy to software development, and all points in between.
In our experience working with companies of all sizes and types, one challenge keeps coming up: cybersecurity operations are becoming more expensive, but not necessarily more effective. Too often, we see teams overwhelmed by alerts, buried in redundant tools, and unsure whether their efforts are aligned with real threats. If this sounds familiar, there’s a better way to approach it—one that blends deep knowledge of threat behavior, innovative process design, and focused spending. And yes, sometimes it means bringing in an outside perspective like ours to get things moving in the right direction.
Starting with Real Threat Intelligence: TTPs
When we start working with a company, one of the first things we look at is how well its cybersecurity efforts align with actual risks. We use industry-specific TTPs—Tactics, Techniques, and Procedures used by real attackers in that sector—to uncover what’s really at stake. For example, in finance, phishing and credential theft are huge; ransomware targeting OT environments is more common in manufacturing.
This isn’t just threat modeling, it’s about making sure the company’s cybersecurity operations are focused on what matters. We’ve seen companies spend big on fancy cybersecurity tools that protect against unlikely scenarios, while overlooking common, costly vulnerabilities. TTPs help us steer the conversation toward high-impact areas that deserve real attention.
Reengineering Cyber Processes That Drag Companies Down
With those threat patterns in mind, we conduct a process analysis to map the way cybersecurity workflows actually operate inside the business. Are patching cycles too slow? Are incidents managed the same way across departments? Are cybersecurity tools overlapping or underutilized?
This is where business process reengineering comes in. We work with teams to strip away complexity, redesign inefficient workflows, and introduce automation or clear accountability where needed. The goal is simple: make the company’s cybersecurity operations faster, smarter, and cheaper without compromising protection.
And we get it—internal teams are often too close to the process to spot the friction. That’s why companies bring us in. We bring an external lens, ask the hard questions, and get everyone aligned on a working strategy.
The Eisenhower Matrix: A Surprisingly Useful Budget Tool
Once we’ve got processes in better shape, it’s time to review technology spending. One of the tools we like to use is the Eisenhower Matrix, which enables us to categorize every cybersecurity investment:
Urgent and Important: Must-haves, like tools protecting your most targeted assets
Important but Not Urgent: Strategic efforts, like employee training or improving logging infrastructure
Urgent but Not Important: Fire-drill requests that burn budget but add little value
Neither Urgent nor Important: Legacy tools collecting dust (and invoices)
This simple framework helps leadership make clearer, faster decisions, and we help drive those conversations with data and context.
Why Bringing in a Consultant Helps
You might wonder, “Why bring in an outside firm to do this?” The answer is that a security consultancy with seasoned experts offers speed, experience, and perspective. We’ve worked with multiple industries, seen common patterns and pitfalls, and can move faster than most internal teams alone. We’re not here to replace your cybersecurity team; our job is to make them more effective.
If you’re serious about reducing costs, boosting productivity, and ensuring your cybersecurity efforts match your business needs, let’s talk. A little outside perspective might be just what your company needs to move forward with clarity and confidence.
Urban Jonson is a co-founder of SERJON (www.serjon.com) and a frequent collaborator with IOActive. Urban is a cybersecurity industry leader and serves in multiple advisory roles, including SAE International, TMC, ESCAR USA, CyberTruck Challenge, and as a cybersecurity expert for FBI InfraGard and the FBI Automotive Sector Working Group.